抛体运动弹道解算#
模型#
本文考虑使用 线性阻力 模型. 事实上, 在空气中运动的阻力应该由 二次阻力 描述, 关于二者的对比将在 后文 给出.
之所以使用线性阻力, 是因为如此一来物体的运动微分方程
$$m \dot{\mathbf{v}} = -k \mathbf{v} - m g \hat{\mathbf{j}}$$有封闭解. 进一步令 \(\mu := \frac{k}{m}\), 上式化为
$$\dot{\mathbf{v}} = -\mu \mathbf{v} - g \hat{\mathbf{j}}$$容易解得
$$\mathbf{v} = \mathrm{e}^{-\mu t} \mathbf{v}_0 - \mu^{-1} (1-\mathrm{e}^{-\mu t}) g \hat{\mathbf{j}}$$积分得
$$ \mathbf{r} = \mathbf{r}_0 - \mu^{-1} (1-\mathrm{e}^{-\mu t}) \mathbf{v}_0 - \mu^{-2} (\mu t + \mathrm{e}^{-\mu t} - 1) g \, \hat{\mathbf{j}} $$这就是线性阻力情况下的运动方程. 它也可以很轻松地分解为两个方向来运算.
与二次阻力的对比#
当速度较大 (\(\sim 20 ~ \mathrm{m/s}\)) 时, 弹丸在空气中运动的 雷诺数 很大, 并不适用于线性阻力. 但是在上升过程中, 速度逐渐下降, 雷诺数也逐渐变小, 于是在上升阶段用线性阻力模型的误差也不是很大.
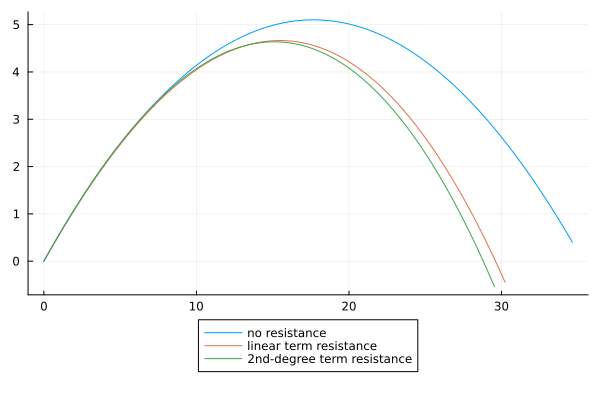
下面的图展示了无阻力, 线性阻力与二次阻力在初速 \(20 ~ \mathrm{m/s}\), 射角 \(60^\circ\) 时的运动轨迹, 可以看到上升阶段两条阻力曲线都十分接近, 随着下降时速度越来越快才逐渐分离.
显然两种阻力的系数量纲不同, 于是其值也必然不同. 找到合适的线性阻力系数就成为逼近真实情况的重点之一. 在流体中的二次阻力可以用 \(f = \frac{1}{2} \rho v^2 C_d S\) 计算, 其中 \(\rho\) 为流体密度; \(C_d\) 为阻力系数, 由实验得出; \(S\) 为参考面积. 我们希望由此推出线性阻力的系数, 使二者轨迹相差无几.
我们令 \(\kappa = \frac{1}{2} \frac{\rho C_d S}{m}\), 于是二次阻力情况下加速度 \(\mathbf{a}_f = -\kappa |\mathbf{v}| \mathbf{v}\); 对比线性阻力情况下 \(\mathbf{a}_f = -\mu \mathbf{v}\), 可以看出重点是找到一个合适的 \(\mu\), 使得其在 \(\mathbf{v}\) 不断变化的时候仍有 \(\mu \sim \kappa |\mathbf{v}|\).
一种朴素的想法是使 \(\mu\) 等于 \(\kappa |\mathbf{v}|\) 的均值. 也就是令
$$\mu = \kappa \frac{\int_{0}^{t} |\mathbf{v}| ~ \mathrm{d} t}{t}$$注意到二次阻力模型下运动方程
$$\begin{align*} \dot{v}_x &= -\kappa |\mathbf{v}| ~ v_x \\ \dot{v}_y &= -\kappa |\mathbf{v}| ~ v_y - g \end{align*}$$蕴含一个 \(|\mathbf{v}|\). 只考虑 \(x\) 方向, 可得
$$\begin{align*} \int_{0}^{t} \kappa |\mathbf{v}| ~ \mathrm{d} t &= -\int_{0}^{t} \frac{\dot{v}_x}{v_x} ~ \mathrm{d} t \\ &= -\int_{v_{0x}}^{v_x} \frac{\mathrm{d} v_x}{v_x} \\ &= \ln{\frac{v_{0x}}{v_x}} \end{align*}$$于是 \(\mu = t^{-1} \ln{(v_{0x}/v_x)}\).
可以通过欧拉法取得 \(v_x\) 的数值解, 对于给定的 \(t\), 可以认为在这段时间内 ( \(0 \sim t\) ) 使用 \(\mu\) 的线性阻力模型与使用 \(\kappa\) 的二次阻力模型取得的轨迹相差无几.
但是应该注意, 随着 \(t\) 的增大, \(v_x\) 逐渐减小趋近于 \(0\), 因此 \(t\) 不宜取得太大. 实际应用中, 可以用射角 \(45^\circ\), 在上升到最高点之前的时间段计算的 \(\mu\) 来作为通用结果使用.
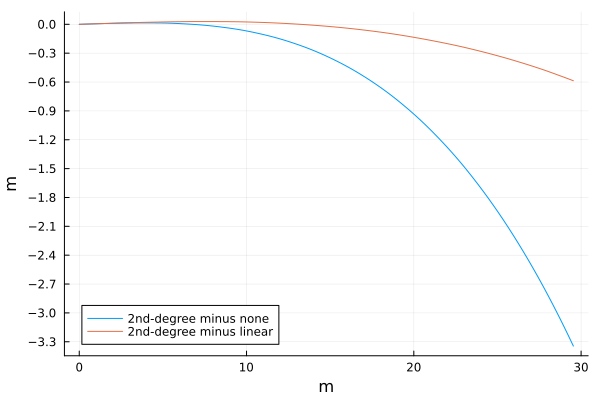
上图展示了参数为 \(\kappa\) 的二次阻力模型与计算得到的使用 \(\mu\) 的线性阻力模型, 以及无阻力模型在 \(y\) 方向上的差值. 射角 \(60^\circ\), 初速 \(20 ~ \mathrm{m/s}\). 可以看出线性阻力模型在 \(x > 15 ~ \mathrm{m}\) 时才有显著的偏差.
轨迹方程#
将运动方程中 \(t\) 消去, 即为轨迹方程.
我们先将初速度 \(\mathbf{v}_0\) 分解为 \(v_0 ~ (\cos{\theta}, \sin{\theta})\), 而后在 \(x\) 方向解出 \(t\):
$$t = \mu^{-1} \ln{\frac{v_0 \cos{\theta}}{v_0 \cos{\theta} - \mu x}}$$之后将其代入 \(y\) 方向, 化简得
$$ y - \frac{g}{\mu^2 v_0} (\mu x \sec{\theta} - v_0 \ln{\frac{v_0}{v_0 - \mu x \sec{\theta}}}) - x \tan{\theta} = 0 $$轨迹上的点 \((x, y)\) 都应满足于上面的方程, 这便是轨迹方程.
在初速 \(v_0\) 确定的情况下, 这是关于 \(\theta\) 的一个方程. 想要得到给定轨道上一点 \((x, y)\) 的情况下 \(\theta\) 的值, 只需解这个方程就好. 可以用诸如 牛顿法 等数值方法来获得相当精确的解.
确定初值#
牛顿法等迭代方法是初值敏感的, 初值的选取决定了迭代的次数与最终精度. 对于有多个根的函数, 初值还决定了最终结果是哪一个根.
显而易见, 对于一般的目标, 抛体运动总有两条可达的轨迹. 一条是在上升时到达, 一条则在下降时. 我们总是更喜欢上升时到达的情况, 因为这样运动的时间短, 且可以使用线性阻力模型更精确地模拟, 误差更小. 这就对初值的选取提出了要求.
令轨迹方程左边为目标函数 \(f(\theta)\), 规定定义域为 \((-\frac{\pi}{2}, \frac{\pi}{2})\) 的子集, 作图观察 (曲线; \(\mu = 0.01\), \(v = 20 ~ \mathrm{m/s}\), \((x, y) = (5, 0.5)\)):
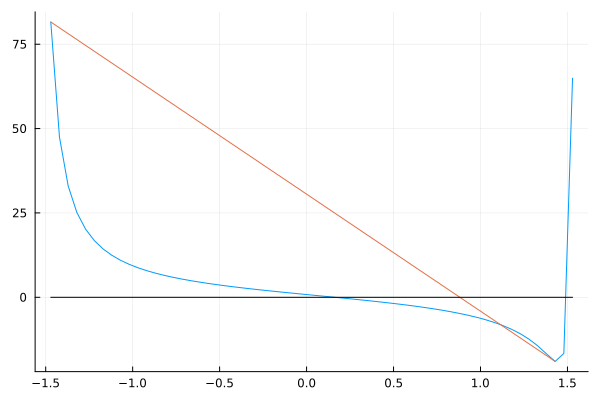
显然有两个解. 并且容易想到上升时到达的轨迹, 射角小于下降时到达的, 于是左边一根即为所求射角.
对目标函数求导并令其等于 \(0\), 可以得到其极值. 容易证明, 其极值至多一个, 且为最小值. 这里直接给出目标函数的最小值点:
$$\theta = \arctan{\frac{v_0^2}{g x}} - \arctan{\frac{\mu x}{\sqrt{v_0^2 + x^2 ((g / v_0)^2 - \mu^2)}}}$$假如我们将初值选在最小值点的左侧, 那么迭代求出的根就是较小的一根. 进一步我们想到, 相较于 区间最左端的点 或 最小值点左邻域内的点, 不妨取这两点连线, 即图上斜线与 \(x\) 轴的交点, 这样更接近于根. 如此一来还可以避开上述两点附近数值不稳定的区域.
排除不可达点#
给定的目标点并不总是有可达的抛体轨迹. 若是能在计算前将其排除, 便可避免再在繁杂的计算中消耗时间. 需要注意的是, 排除过程也需耗时, 且对于每个输入数据都需要计算, 因此需要平衡前期排除与正式计算间的平衡, 以优化耗时.
射角范围#
实际应用中, 射角几乎总是不能达到 \((-\frac{\pi}{2}, \frac{\pi}{2})\), 于是若目标点与原点的夹角大于射角的最大值, 那么显然不能到达.
尤其注意, 当夹角小于射角最小值时, 仍然有可能到达, 因为物体在重力作用下会下坠.
包络线#
另外, 若是无阻力模型都到达不了的点, 那么线性乃至于二次阻力模型也一定不可达. 因此可以使用抛物线的包络线来检查, 若是在包络线以外 (以上) 的点, 一定是不可达点.
对于无阻力的抛体运动, 可以直接写出其运动方程
$$\begin{align*} x &= v_0 t \cos{\theta} \\ y &= v_0 t \sin{\theta} - \frac{1}{2} g t^2 \end{align*}$$两式联立消去 \(t\), 得到
$$\begin{align*} y &= v_0 \sin{\theta} ~ \frac{x}{v_0 \cos{\theta}} - \frac{1}{2} g (\frac{x}{v_0 \cos{\theta}})^2 \\ &= x \tan{\theta} - \frac{g x^2}{2 v_0^2} \sec^2{\theta} \\ &= x \tan{\theta} - \frac{g x^2}{2 v_0^2} (1 + \tan^2{\theta}) \end{align*}$$以 \(\theta\) 为未知数, 若是其恰有一解, 则上述轨迹方程处于临界状态; 若目标点再稍抬高则不可达. 注意到上述方程为关于 \(\tan{\theta}\) 的二次方程, 且 \(\tan{x}\) 在 \((-\frac{\pi}{2}, \frac{\pi}{2})\) 内为双射, 于是令
$$\begin{align*} \Delta &= x^2 - 4 \frac{g x^2}{2 v_0^2} (\frac{g x^2}{2 v_0^2} + y) \\ &= 0 \end{align*}$$即
$$y = -\frac{g}{2 v_0^2} x^2 + \frac{v_0^2}{2 g}$$这便是抛体运动的包络线方程. 若点 \((x, y)\) 在方程之上, 则不可到达.
其他#
在实际计算中对于根号与分式要特别注意, 防止出现超出定义域的情况. 可以在计算前简要判断一下, 确保各函数的自变量都在其定义域内.
代码实现#
代码 [Web] 由 julia 编写. Benchmark 显示其性能十分卓越:
#@benchmark θ([5.,0.5], 20., 9.8, 0.1, (-pi/6,pi/3))
BenchmarkTools.Trial: 10000 samples with 223 evaluations per sample.
Range (min … max): 331.390 ns … 19.150 μs ┊ GC (min … max): 0.00% … 97.41%
Time (median): 335.426 ns ┊ GC (median): 0.00%
Time (mean ± σ): 363.941 ns ± 333.661 ns ┊ GC (mean ± σ): 1.97% ± 2.52%
Memory estimate: 80 bytes, allocs estimate: 2.
可以看到计算一次的时间仅为 \(335.426 ~ \mathrm{ns}\) (中位数), 占用 \(80\) 字节空间.