Delta 机器人的动力学建模#
Delta 机器人 是一种三自由度的常用并联型机器人. 由于其特殊设计, 能够保证其顶板始终平行于底板, 只有三个平动自由度而无转动. 这一点很容易证明, 此处不再赘述. 因此我们将按下面的模型讨论
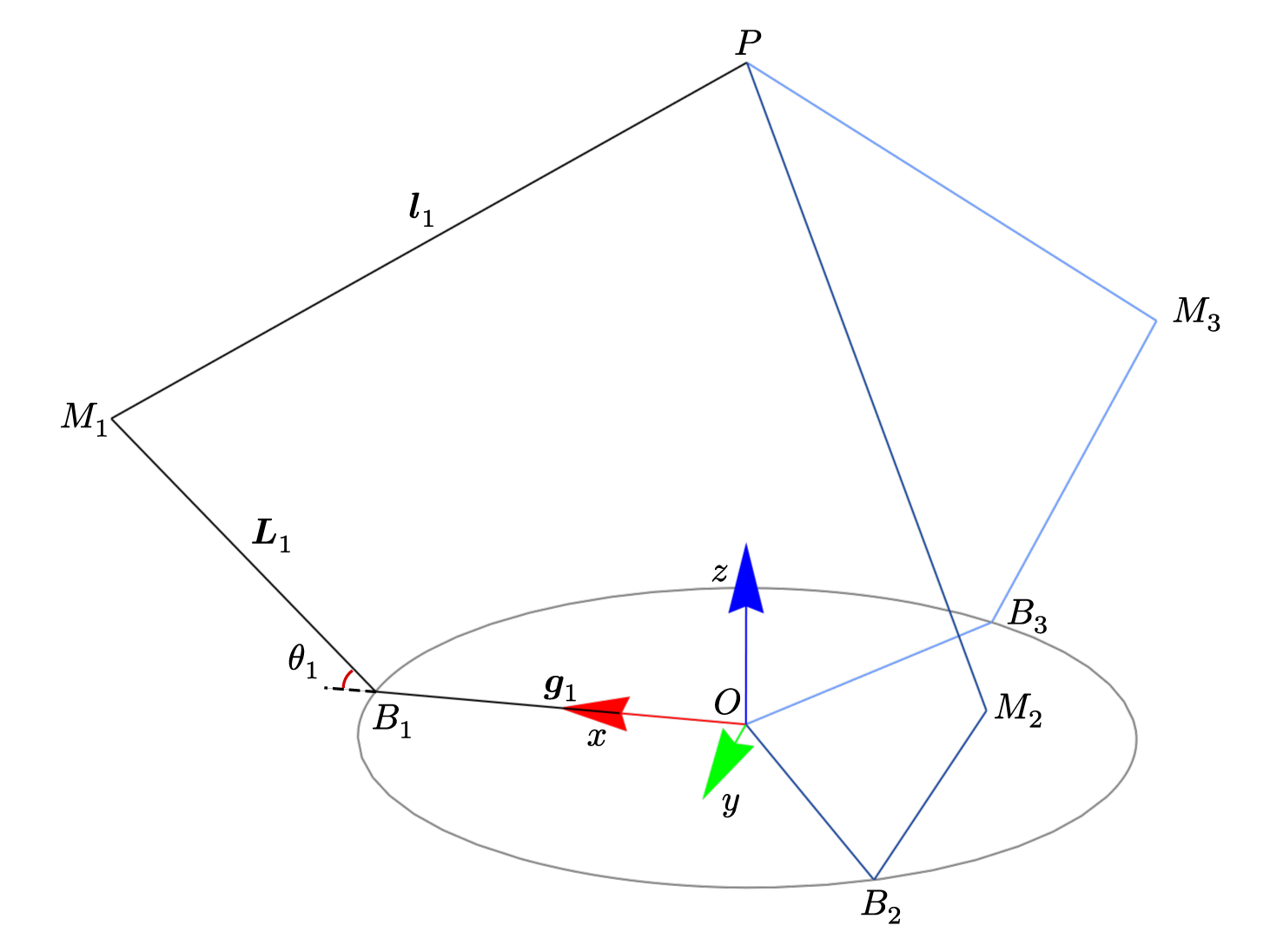
机器人有三个可以独立活动的支部, 编号为 \(1\), \(2\), \(3\), 按右手顺序排列, 彼此相隔 \(\frac{2\pi}{3}\). 我们之后的讨论将更多只限于同一个支部, 在不引起误会的情况下, 将省略下标以求简洁. 此时我们讨论的将是适用于三支的通用关系.
约定粗体 \(\mathbf{L}\) 代表向量, 非粗体的相同字母代表其模长 \(L := \|\mathbf{L}\|\). 在模型中, \(L_i\), \(i = 1,2,3\) 都是等长的, 因此都记为 \(L\); \(g\) 与 \(l\) 同理. 单位坐标轴方向为 \(\hat{\mathbf{i}}\), \(\hat{\mathbf{j}}\), \(\hat{\mathbf{k}}\); \(\hat{\cdot}\) 表示归一化. \(P\) 为关心的末端位置.
正向运动学#
正向运动学解决的问题是如何通过已知的广义坐标 \(\theta_i\), \(i = 1,2,3\) 来得到 \(P\) 的位置. 我们将从底部开始, 逐步地依次求解 \(B\), \(M\) 直到 \(P\) 的位置.
中途向量#
\(\mathbf{g}\) 与 \(B\) 的求解是极为简单的. 记方位角 \(\phi\) 为三支在水平面上的偏角, 有 \(\phi_1 = 0\), \(\phi_2 = \frac{2\pi}{3}\), \(\phi_3 = \frac{4\pi}{3}\). 于是